

Los dos robots, MiniBug y WaterStrider , miden 8,5 mm y 22 mm de largo respectivamente y pueden moverse a una velocidad de unos 6 mm por segundo.
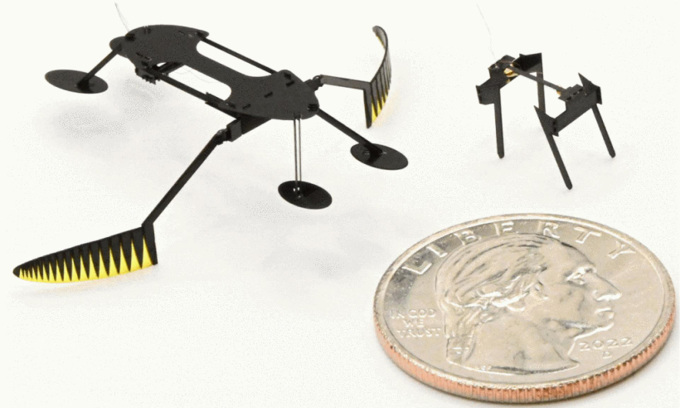
El robot WaterStrider y el MiniBug junto a una moneda. Foto: Bob Hubner/WSU
Un equipo de investigadores de la Universidad Estatal de Washington ha desarrollado dos robots con forma de insecto, llamados MiniBug y WaterStrider, según informó TechXplore el 18 de enero. Son los robots más pequeños, ligeros y rápidos de su tipo. En el futuro, estos microrrobots podrían utilizarse para diversas actividades, como la polinización artificial, la búsqueda y el rescate, la monitorización ambiental, la microfabricación o la cirugía.
MiniBug mide 8,5 milímetros de largo y pesa 8 miligramos, mientras que WaterStrider mide 22 milímetros de largo y pesa 55 miligramos. Ambos pueden moverse a unos 6 milímetros por segundo. Si bien son más lentos que los insectos naturales, son rápidos en comparación con microrrobots de tamaño similar, afirma Conor Trygstad, estudiante de doctorado de la Escuela de Ingeniería Mecánica y de Materiales y autor principal del estudio. Una hormiga de 5 miligramos puede moverse a casi un metro por segundo.
La clave de estos robots reside en los diminutos actuadores que les permiten moverse. Trygstad utilizó una nueva técnica de fabricación para reducir el tamaño de los actuadores a menos de un miligramo, el más pequeño jamás fabricado. «Estos son los actuadores más pequeños y rápidos jamás desarrollados para microrrobots», afirma Néstor O. Pérez-Arancibia, profesor de la Escuela de Ingeniería Mecánica y de Materiales de la Universidad Estatal de Washington.
Los actuadores utilizan aleaciones con memoria de forma, que cambian de forma al calentarse. Este material se denomina "con memoria de forma" porque recuerda su forma original y puede volver a ella. A diferencia de los motores convencionales utilizados para mover robots, estas aleaciones no tienen piezas móviles ni giratorias.
Las aleaciones con memoria de forma no suelen utilizarse para movimientos robóticos de gran tamaño debido a su lentitud. Sin embargo, para el MiniBug y el WaterStrider, los actuadores están compuestos por dos alambres de aleación con memoria de forma de tan solo 0,025 mm de diámetro. Con una pequeña corriente, los alambres se pueden calentar y enfriar fácilmente, lo que permite al robot batir sus aletas o mover sus patas a velocidades de hasta 40 veces por segundo. En pruebas preliminares, los actuadores también pudieron levantar objetos 150 veces su propio peso.
Thu Thao (según TechXplore )
[anuncio_2]
Enlace de origen
![[Foto] Espacio cultural multicolor en la Exposición "80 años del viaje de la Independencia - Libertad - Felicidad"](https://vphoto.vietnam.vn/thumb/1200x675/vietnam/resource/IMAGE/2025/8/26/fe69de34803e4ac1bf88ce49813d95d8)
![[Foto] Hanoi: Las autoridades trabajan arduamente para superar los efectos de las fuertes lluvias](https://vphoto.vietnam.vn/thumb/1200x675/vietnam/resource/IMAGE/2025/8/26/380f98ee36a34e62a9b7894b020112a8)





































































































Kommentar (0)